
متحف RAIM في سيول يجسد العمارة البارامترية والتصنيع الرقمي
العمارة البارامترية كمنهج تصميمي
تُستخدم بعض مشاريع معمارية كحالات دراسية لفهم تطور العمارة البارامترية، ليس بسبب شكلها فقط، بل بسبب آليات تنفيذها أيضًا. وفي هذا السياق، يبرز متحف سيول للروبوتات والذكاء الاصطناعي (RAIM) باعتباره مثالًا يوضح كيف يمكن أن تتحول عملية التشييد نفسها إلى جزء من الفكرة المعمارية.
العلاقة بين الشكل والبنية
افتُتح المتحف عام 2024 في منطقة تشانغ دونغ شمال شرق سيول، وصممه Melike Altınışık Architects كحالة دراسية في أبحاث معمارية بارامترية. يعتمد المبنى على غلاف كروي بسطح عاكس يكوّن حضورًا بصريًا مختلفًا عن الأشكال المؤسسية التقليدية، مع واجهة تتكون من 3,422 لوحًا معدنيًا مزدوج الانحناء، صُممت كل قطعة وفق متطلبات هندسية محددة.
إظهار المنطق الإنشائي عبر الواجهة
لا يعمل نمط الشبكة الخارجية هنا كعنصر زخرفي فقط، بل يرتبط مباشرة بالشبكة الهيكلية الفولاذية الموجودة خلفه. ونتيجة لذلك، يصبح النظام الإنشائي قابلًا للقراءة من خلال الغلاف الخارجي للمباني نفسه، وهو نهج يربط بين التعبير المعماري والمنطق البنيوي بصورة مباشرة.


من التصميم البارامتري إلى قابلية التنفيذ
لا تنشأ بعض الأشكال المعمارية المعقدة من الرسم التخطيطي التقليدي، بل من نماذج تصميمية تعتمد على البرمجة البارامترية. وفي حالة متحف سيول للروبوتات والذكاء الاصطناعي، جرى تطوير الشكل رقميًا ثم إعادة هندسة الغلاف الخارجي ليصبح قابلًا للتنفيذ. تاريخيًا، كانت هذه المرحلة تمثل تحديًا متكررًا في أخبار معمارية عن المشاريع البارامترية، إذ كانت العناصر مزدوجة الانحناء تُبسّط خلال مراحل التنفيذ بسبب قيود التكلفة والتصنيع.
توافق التصميم مع عمليات الإنتاج
استخدمت Melike Altınışık Architects منهجية DFMA (التصميم من أجل التصنيع والتجميع)، وهي مقاربة تعتمد على تطوير الشكل وآلية إنتاجه بصورة متوازية بدلًا من معالجتهما كمرحلتين منفصلتين. وبهذه الطريقة، لا يصبح الشكل المعماري عنصرًا يحتاج إلى تعديلات مستمرة أثناء التنفيذ، بل جزءًا من نظام إنتاجي جرى التفكير فيه منذ البداية، وهو ما يتوافق مع أحدث طرق التصميم المعاصر.
دور الأتمتة في دقة التنفيذ
اعتمدت عملية التصنيع على قطع الألواح باستخدام ماكينات CNC الليزرية، بينما تولّت الروبوتات الصناعية عمليات اللحام، مع استخدام تقنيات المسح ثلاثي الأبعاد في الموقع لضبط المحاذاة بدقة عالية. ونتيجة لذلك، أصبحت عمليات تنفيذ الألواح المعدنية مزدوجة الانحناء أكثر قابلية للتطبيق في مسابقات معمارية ومشاريع ثقافية متوسطة الحجم، كما ساعدت الأتمتة على الحفاظ على مستوى ثابت من الدقة خلال تنفيذ عدد كبير من العناصر المتكررة.



المتحف كنظام معرفي وتجريبي
عند إضافة وظيفة المتحف إلى معادلته المعمارية، يصبح RAIM أكثر من مجرد مبنى بتكوين بارامتري. فالمتحف مخصص للروبوتات والذكاء الاصطناعي، وتعرض معارضه الدائمة تطور هذا المجال من أنظمة التنبؤ بالكشف عن الاحتيال إلى النماذج التوليدية. وبهذا، يتحول المحتوى المعرفي إلى جزء من الفكرة المعمارية وليس عنصرًا منفصلًا عنها، كما هو شائع في الفعاليات المعمارية المعاصرة.
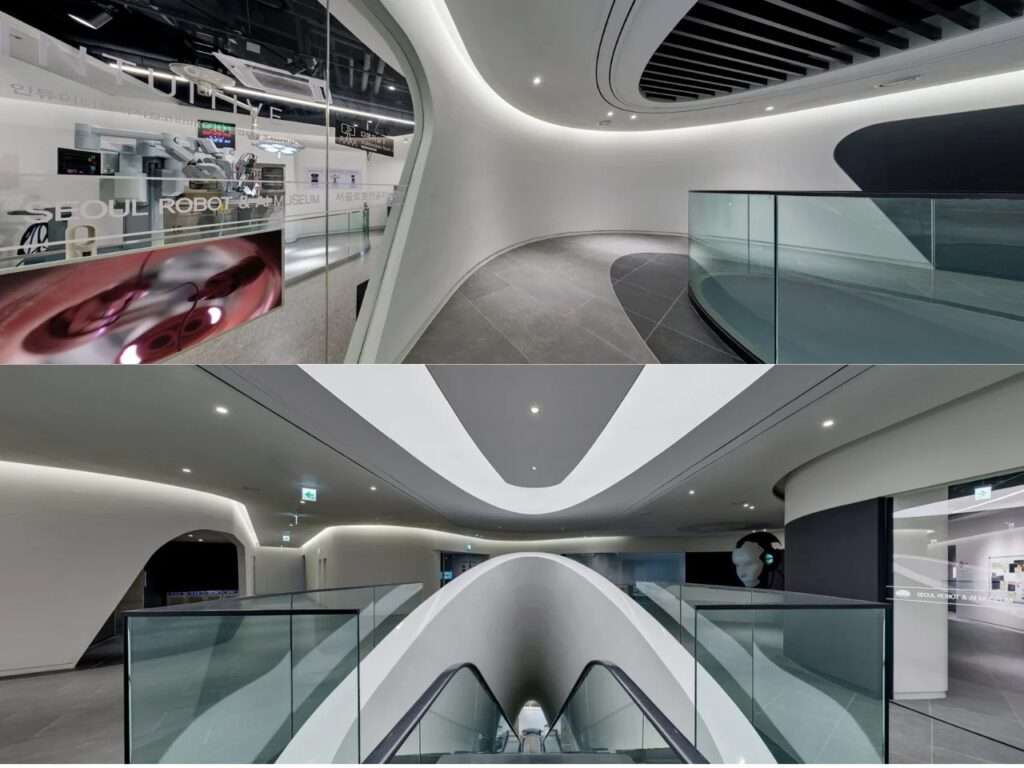
تداخل التجربة المكانية مع الذكاء الاصطناعي
يظهر هذا التكامل بوضوح في التجربة الداخلية، حيث تستقبل الروبوتات الزوار عند المدخل، بينما يتخذ الفراغ الداخلي طابعًا يشبه السفن الفضائية. كما يحتل نفق عرض عمودي مركز المبنى، ما يخلق حالة بصرية تقلل الحدود بين العالم المادي والنظام التقني المعروض داخله. وفي هذا السياق، يصبح إدراك أن الروبوتات شاركت أيضًا في تجميع الواجهة امتدادًا مباشرًا لفكرة التصميم الداخلي للمتحف.
من المبنى إلى فكرة متكاملة
هذا التداخل بين الشكل، والتقنية، والمحتوى يعكس تحوّلًا أوسع في الخطاب المعماري. وقد أشارت Melike Altınışık Architects إلى هذا البعد بقولها إن العمارة يمكن أن تكون «مأوى ووسيلة تعليم في آنٍ واحد». ونتيجة لذلك، لا يكتفي المبنى باحتضان فكرة الذكاء الاصطناعي، بل يعيد تمثيلها داخل بنيته. ومع تطور العمارة البارامترية، يصبح RAIM مثالًا على انتقال النقاش من إمكانية التنفيذ إلى منطق إنتاجه ومن يشارك في تشكيله، وهو ما يُوثقه أرشيف المحتوى المتخصص.



✦ تحليل ArchUp التحريري
يعمل متحف RAIM في سيول كناتج مكاني لتقاطع سياسات التمويل الثقافي البلدي مع استثمارات المدن وأبحاث الروبوتات وحوافز أتمتة صناعة البناء، حيث ينشأ الدافع الأساسي من استراتيجية مؤسسية تهدف إلى تحويل بنية الذكاء الاصطناعي إلى رأس مال ثقافي داخل السوق الحضري. تظهر نقاط الاحتكاك في قيود التأمين على الألواح المعدنية مزدوجة الانحناء، ودقة التصنيع، وضغط تكاليف العمالة، وهي تحديات جرى امتصاصها عبر منهجية DFMA وسلاسل إنتاج تعتمد على ماكينات CNC واللحام الروبوتي، مع استخدام ورقات بيانات المواد لتوثيق مواصفات الألواح. يتجسد الحل المكاني في غلاف بارامتري يكشف منطق الإنشاء عبر الواجهة، محولًا عملية التجميع إلى محتوى بصري. كما يثبت البرنامج الداخلي هذا التوازن عبر دمج حركة الزوار مع الفعل الآلي للروبوتات ضمن نظام تشغيلي واحد، يذيب الحدود بين المعرض وآلية الإنتاج.





